


Bộ ba phần mềm của RIEGL hỗ trợ toàn diện cho quy trình xử lý dữ liệu LiDAR, từ thu thập, quản lý, xử lý cho đến phân loại dữ liệu.
RiACQUIRE
Đây là phần mềm được sử dụng trong bước đầu tiên, thu thập dữ liệu từ hệ thống quét laser di động và trên không của RIEGL.
RiPROCESS
Được sử dụng để quản lý, xử lý, phân tích và hiển thị dữ liệu đó, cho phép người dùng quản lý tất cả dữ liệu được thu thập và xử lý trong một dự án duy nhất.
LIS ALS Classification
Plugin này được tích hợp vào phần mềm RiPROCESS, cho phép phân loại dữ liệu đám mây điểm thành các lớp như mặt đất, các công trình và thảm thực vật.

Phần mềm Thu thập Dữ liệu
Dành cho Hệ thống Máy quét LiDAR trên không và di động của RIEGL

- Thu thập dữ liệu quét theo dự án và điều khiển máy quét
- Hiển thị trực tuyến dữ liệu giám sát tham chiếu địa lý trong quá trình thu thập
- Đảm bảo chất lượng với lịch sử chi tiết về các sự kiện, tham số hệ thống và các thao tác của người vận hành
- Phản hồi trạng thái để nhận diện nhanh chóng bởi người vận hành
- Sử dụng thông tin kế hoạch bay cho thu thập dữ liệu tự động (ALS)
RiACQUIRE bao phủ một loạt các nhiệm vụ hiện diện trong các hệ thống LiDAR di động và trên không của RIEGL. Cả hai, hệ thống di động và trên không đều bao gồm ít nhất một máy quét LiDAR, một hệ thống đo vị trí và phương vị, và một trạm làm việc của người vận hành. Nhiều hệ thống khác còn bao gồm các hệ thống phụ camera, máy quét LiDAR bổ sung, các thiết bị lưu trữ dữ liệu lớn, và các bộ phận cơ khí.
Các nhiệm vụ được RiACQUIRE xử lý sẽ phân bổ cho thu thập dữ liệu hoạt động, các giai đoạn tích hợp hệ thống, xác minh & thử nghiệm hệ thống. Giao diện dễ sử dụng, mạnh mẽ nâng cao khả năng giao tiếp với các máy quét LiDAR RIEGL được hỗ trợ. Với mục tiêu giảm tải công việc cho người vận hành hệ thống, chỉ hiển thị thông tin liên quan nhất và các nhiệm vụ có thể được thực hiện bán tự động. Các tham số quét được thay đổi dễ dàng bằng cách chọn một bộ tham số được xác định trước.
Giao diện người dùng phù hợp điều kiện làm việc khó khăn bên trong máy bay, tàu hoặc xe bằng cách cung cấp các nút điều khiển lớn, dễ dàng bấm ngay cả trong điều kiện thiếu ổn định.
Luồng Công Việc Trong RiACQUIRE
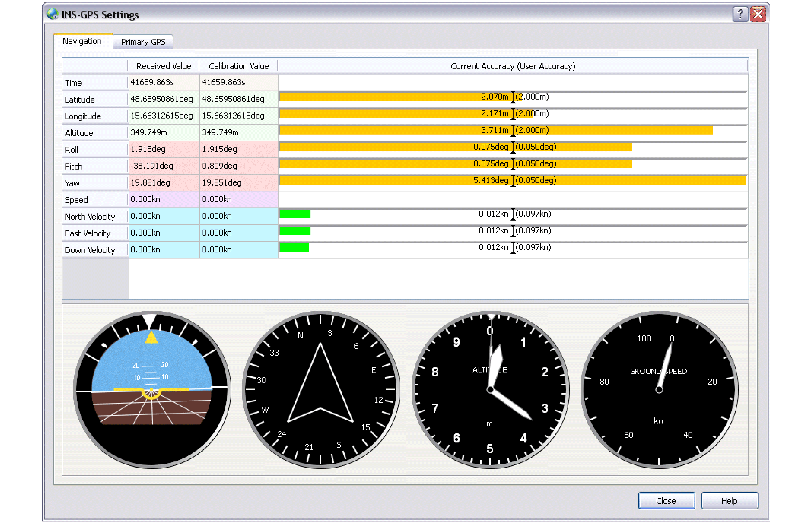
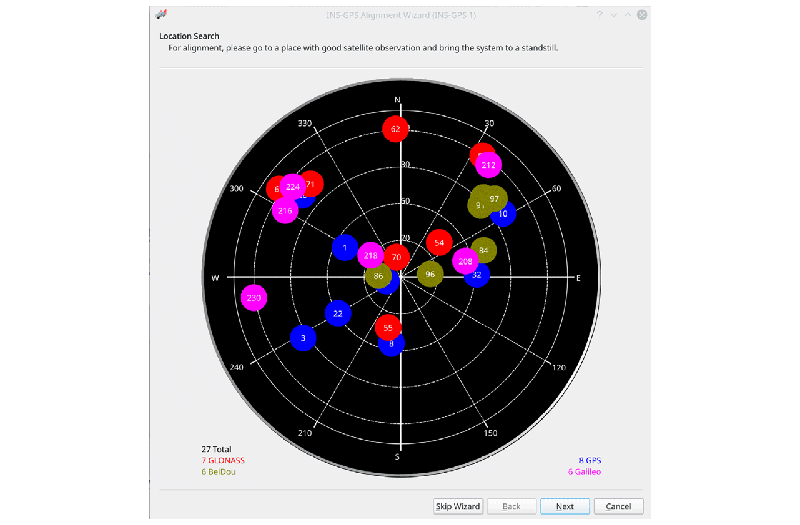
Để đảm bảo chất lượng dữ liệu, RiACQUIRE có thể thu thập dữ liệu giám sát từ máy quét LiDAR và dữ liệu trực tuyến được cung cấp bởi hệ thống INS/GNSS. RiACQUIRE cung cấp thông tin trực quan về các phép đo thực tế từ hệ thống INS/GNSS để dễ dàng kiểm tra tính hợp lý của kết quả. Việc ghi lại liên tục trạng thái hệ thống, phương vị và vị trí INS/GNSS, cũng như tất cả các tương tác của người vận hành với RiACQUIRE cung cấp một lịch sử chi tiết về nhiệm vụ khảo sát, được lưu trữ để phân tích và tài liệu hóa sau này.
RiACQUIRE hiện cũng hỗ trợ thông tin từ các giải pháp phần mềm hướng dẫn bay cho thu thập dữ liệu tự động theo kế hoạch bay được xác định trước.
Các Tính Năng Chính Của RiACQUIRE
- Điều khiển các máy quét LiDAR trên không và di động của RIEGL bán tự động hoặc thủ công
- Hỗ trợ tất cả các máy quét LiDAR của RIEGL cho các ứng dụng ALS & MLS
- Hỗ trợ chung cho các camera kỹ thuật số
- Các hệ thống INS/GNSS được hỗ trợ: IGI AEROcontrol, Applanix POS AV/LV/MV, OxTS RT Family, GGS AeroDIDOS, IXBLUE AIRINS/LANDINS, NovAtel SPAN, Kongsberg Seapath, …
- Phản hồi trạng thái hệ thống được đơn giản hóa để nhận diện nhanh chóng bởi người vận hành
- Truy cập dễ dàng cho người vận hành để cấu hình các tham số hệ thống
- Đảm bảo chất lượng với lịch sử chi tiết về các sự kiện, tham số hệ thống và các thao tác của người vận hành được lưu trữ để phân tích sau này
- Giám sát dữ liệu qua UDP, TCP, và giao diện RS-232
- RiACQUIRE cũng có thể được vận hành từ xa
- Thu thập dữ liệu tự động theo kế hoạch bay
Phần mềm Xử lý Dữ liệu
Dành cho Dữ liệu Quét của RIEGL

- Phần mềm theo hướng dự án để quản lý và xử lý dữ liệu RIEGL ALS, ULS, và MLS
- Hoạt động trong môi trường đa trạm làm việc, xử lý nhiệm vụ song song
- Truy cập nhanh vào dữ liệu để kiểm tra trong các định dạng trực quan hóa khác nhau
- Hiệu chỉnh hệ thống và điều chỉnh dữ liệu quét
- Phân tích thống kê về tham chiếu, chất lượng kết hợp
- Phân loại đám mây điểm
- Giao tiếp với các gói phần mềm của bên thứ ba
RiPROCESS được thiết kế để quản lý, xử lý, phân tích, và trực quan hóa dữ liệu thu thập từ các hệ thống quét LiDAR trên không (ALS), hệ thống quét LiDAR không người lái (ULS) và hệ thống quét LiDAR di động (MLS) dựa trên Máy quét LiDAR RIEGL®. Xuất dữ liệu trong hệ thống trắc địa được hỗ trợ bởi GeoSysManager.
RiPROCESS theo hướng dự án và cho phép người dùng quản lý tất cả dữ liệu thu thập và xử lý trong một dự án duy nhất. Dữ liệu này bao gồm dữ liệu dự án, thông tin về hệ thống quét như lắp đặt và hiệu chỉnh, dữ liệu thô của máy quét,
Ví dụ như tín hiệu phản hồi kỹ thuật số từ Máy quét LiDAR RIEGL, dữ liệu camera, dữ liệu vị trí và phương vị từ hệ thống INS/GNSS, và đám mây điểm tham chiếu địa lý với các thuộc tính bổ sung cho mỗi điểm đo được.
Các nhiệm vụ xử lý dữ liệu bao gồm:
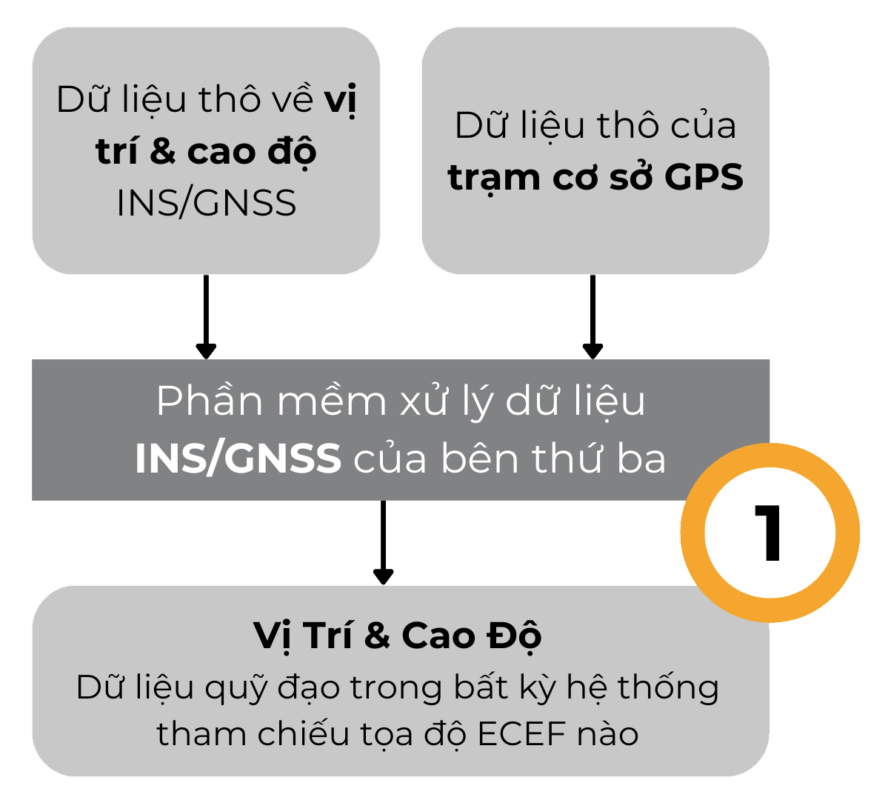
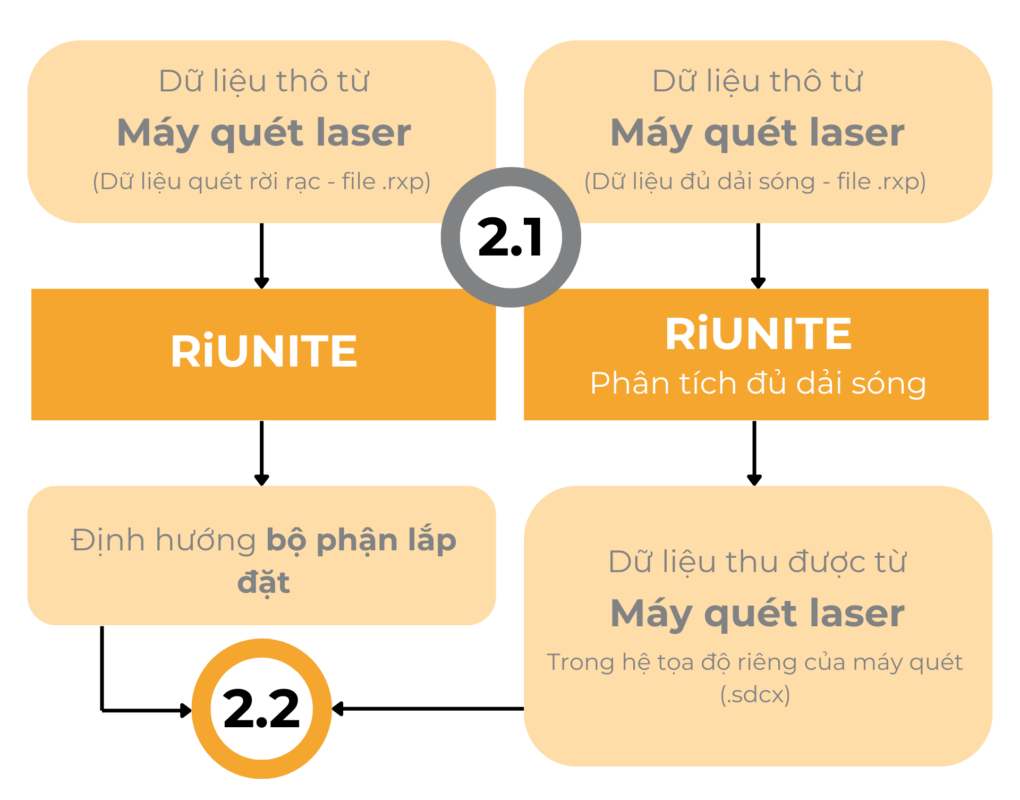
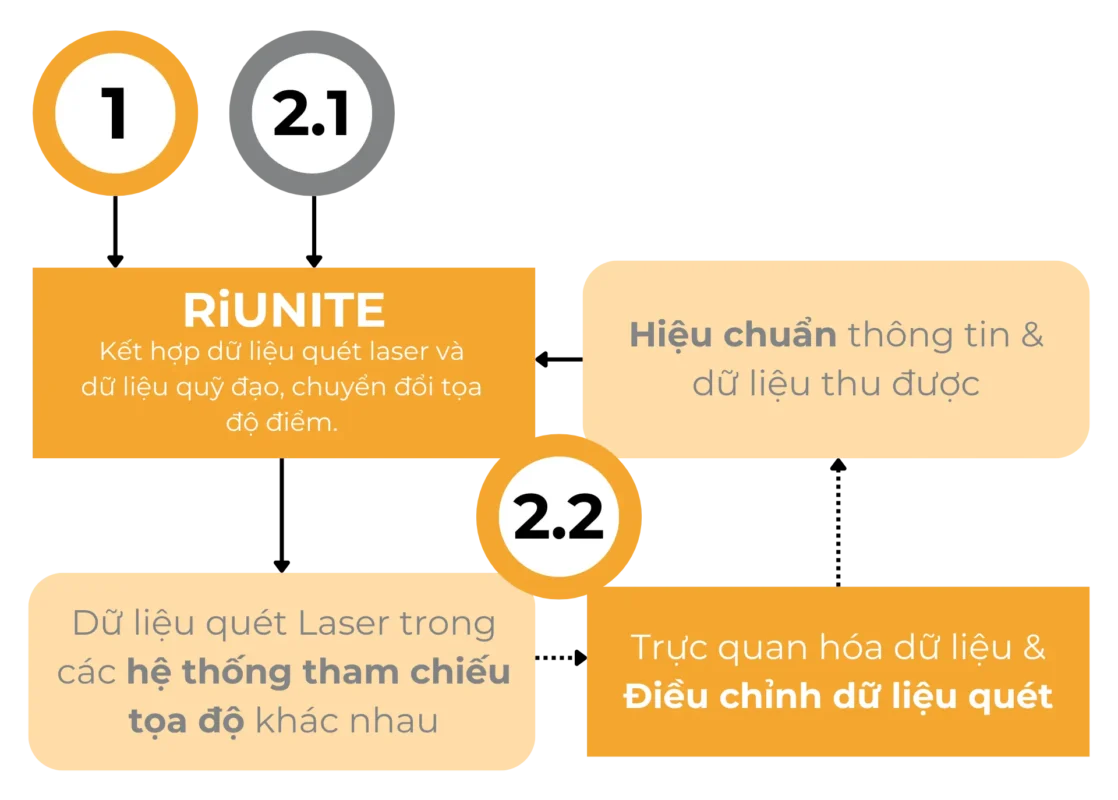
Phân tích sóng hình toàn bộ và tham chiếu địa lý dữ liệu LiDAR bằng cách hợp nhất nó với quỹ đạo thu được từ hệ thống INS/GNSS. Các chức năng này được cung cấp bởi phần mềm RiUNITE và GeoSysManager của RIEGL. RiPROCESS dành cho sản xuất dữ liệu khối lượng lớn trong môi trường đa trạm làm việc.
RiPROCESS sử dụng các chương trình này, có thể được cài đặt trên các trạm làm việc khác nhau và được truy cập qua RiSERVER.
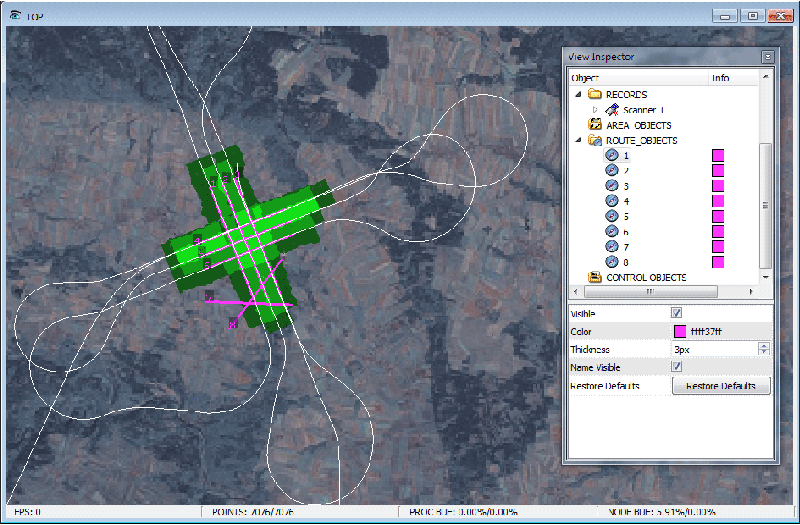
Xử Lý Dữ Liệu Với RiPROCESS
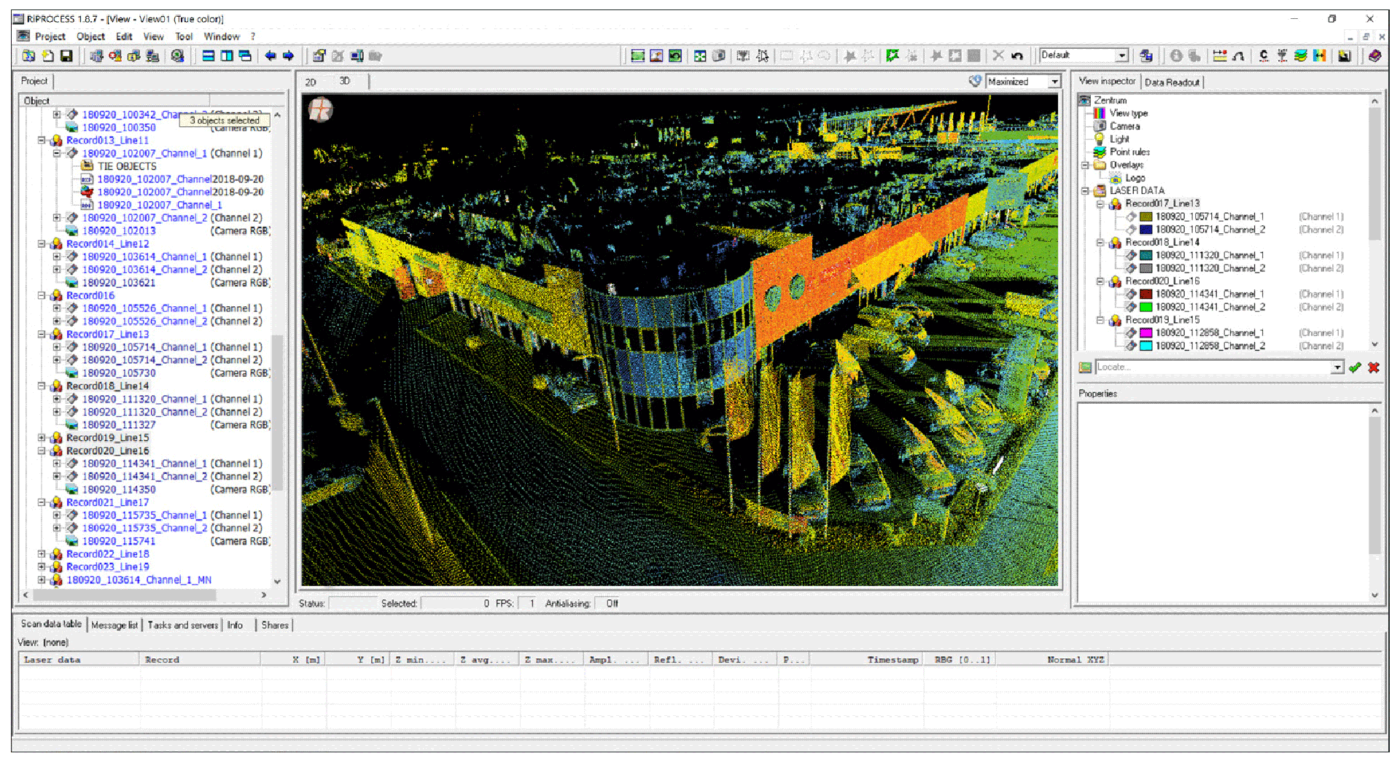
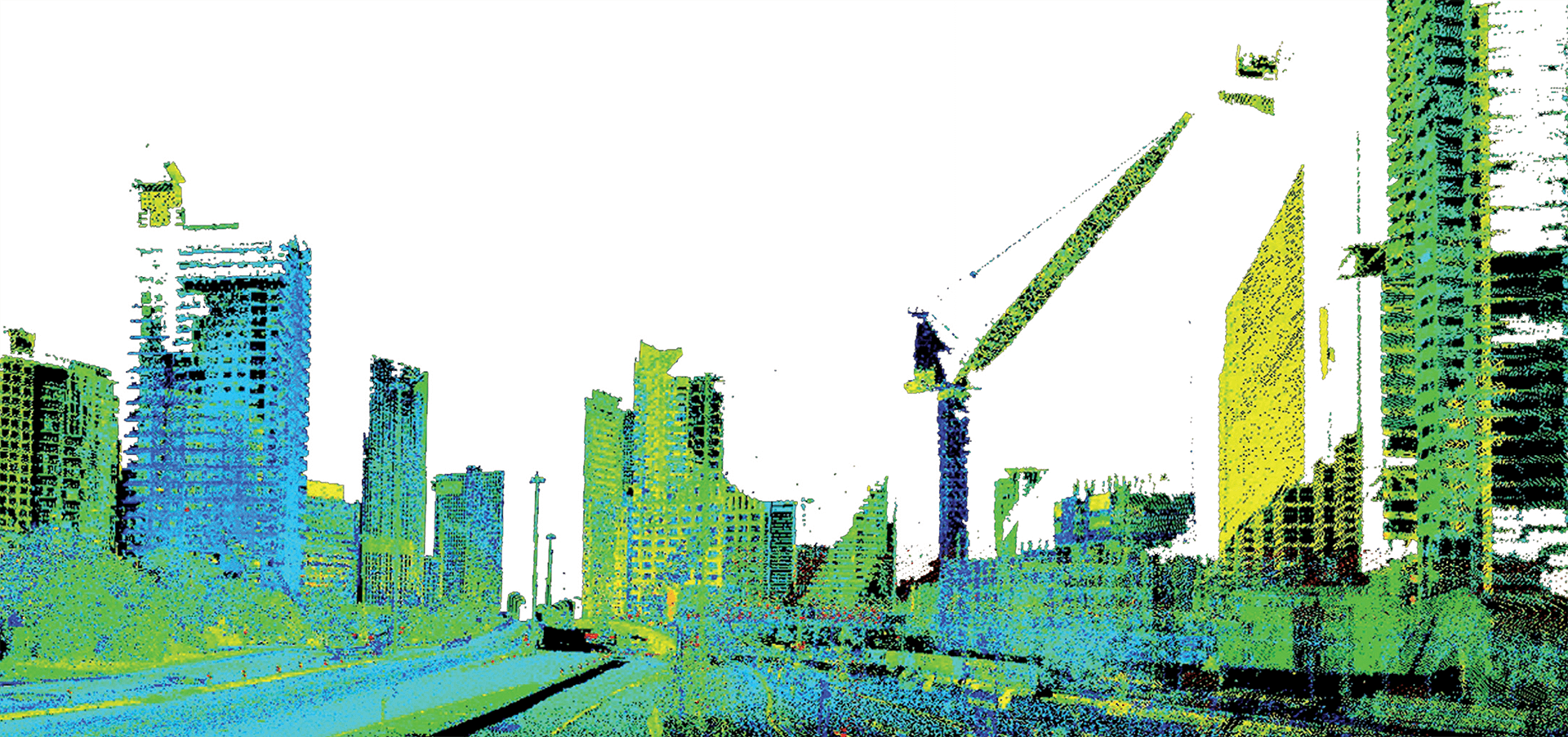
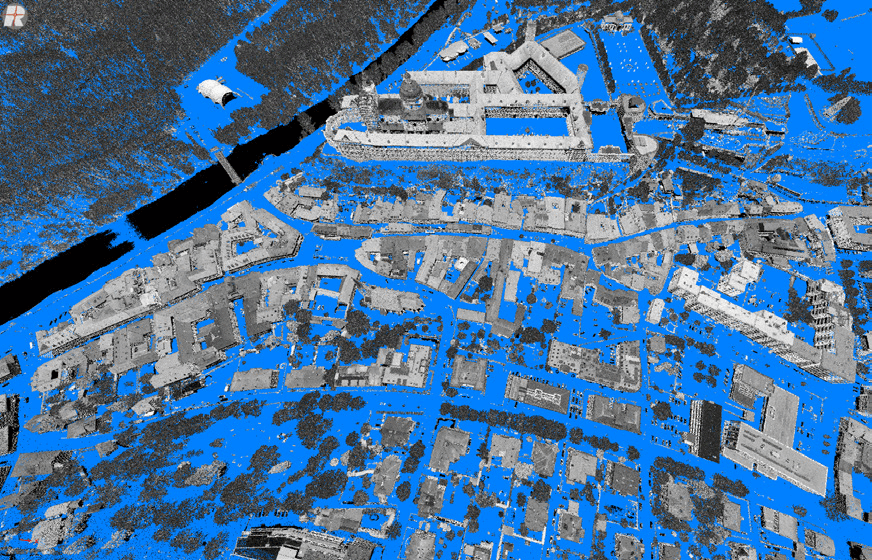
Hình 1. Dữ liệu quét LiDAR di động
RiPROCESS phân phối tính toán dưới dạng các nhiệm vụ riêng lẻ, do đó tối ưu hóa xử lý dữ liệu. Để phân tích chất lượng dữ liệu, các quét LiDAR có thể được trực quan hóa ở dạng mã hóa màu theo độ cao 2D, chênh lệch độ cao, mật độ điểm, và nhiều hơn nữa. Ngay cả lượng dữ liệu khổng lồ cũng có thể được truy cập nhanh chóng để hiển thị ở dạng 3D. Chất lượng khớp nối dữ liệu quét có thể được đánh giá theo nhiều cách khác nhau, bằng cách kiểm tra trực quan hoặc bằng phân tích thống kê.
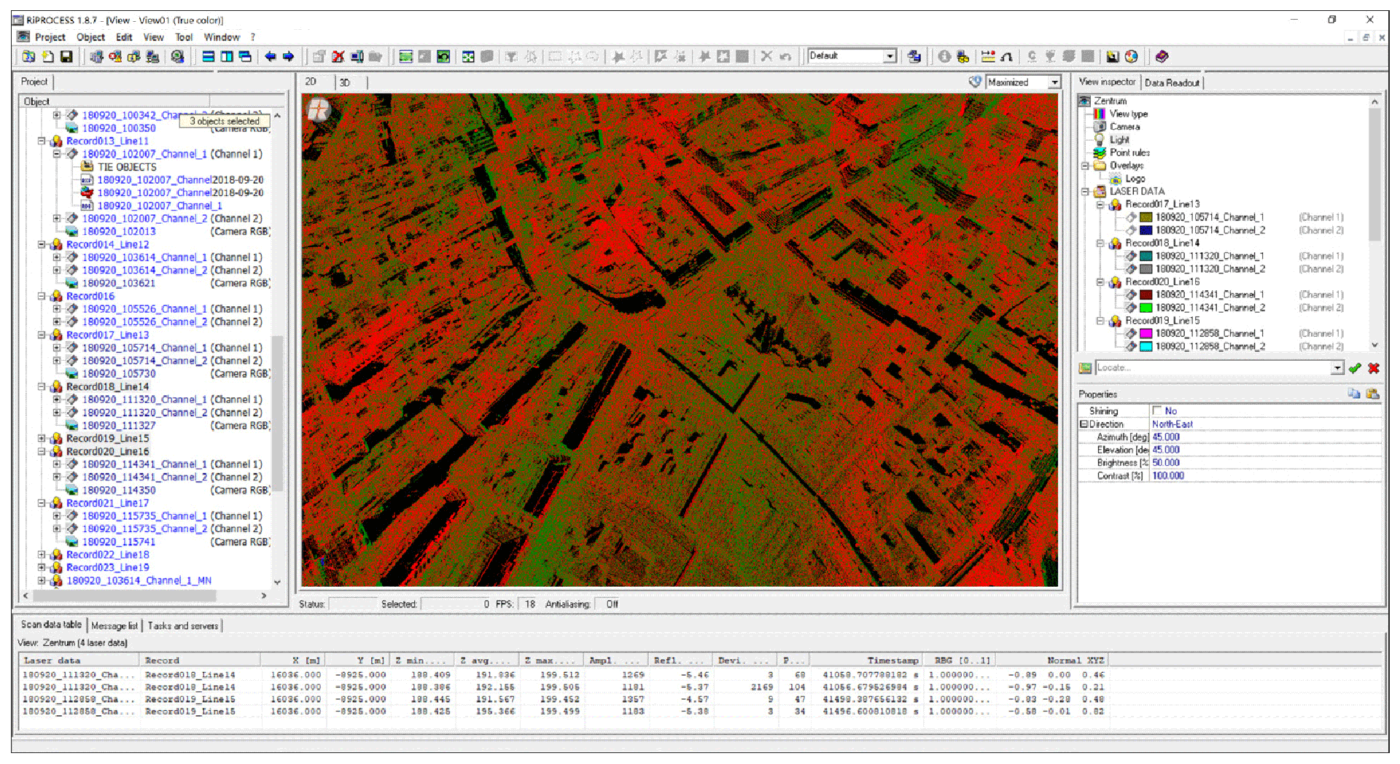
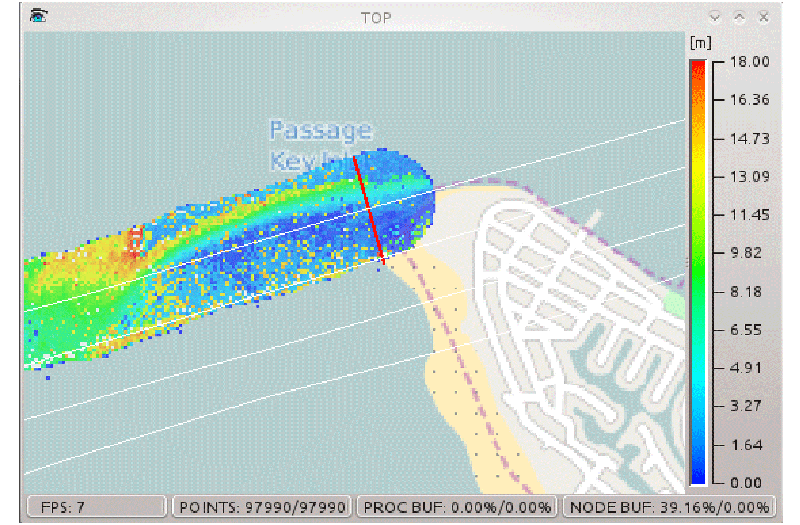
Hình 2. Dữ liệu quét LiDAR trên không
Để cải thiện chất lượng dữ liệu, RiPROCESS cung cấp tính năng điều chỉnh dữ liệu quét tích hợp dựa trên việc khớp nối dữ liệu thu thập trên các đối tượng phẳng, ví dụ như mái nhà. Dữ liệu thu thập trên các đối tượng phẳng được tự động phát hiện trong dữ liệu quét và được hiển thị để kiểm tra ở dạng 2D và 3D.
Các tham số được tối ưu hóa trong điều chỉnh dữ liệu quét bao gồm thông tin hiệu chỉnh hệ thống, và tối đa 6 độ dịch chuyển (góc và tuyến tính) cho mỗi dữ liệu quét đơn lẻ. Các điểm kiểm soát được khảo sát trên mặt đất hoặc các đối tượng kiểm soát phẳng cũng có thể được sử dụng để cải thiện thêm tham chiếu địa lý tuyệt đối của tập dữ liệu.
RiPROCESS cho phép xuất dữ liệu theo định dạng LAS (trong số các định dạng khác) để thực hiện các tác vụ phổ biến như phân loại, tam giác hóa và giảm mật độ điểm bằng các gói phần mềm của bên thứ ba. GeoSysManager được tích hợp cung cấp một công cụ mạnh mẽ để xuất đám mây điểm tham chiếu địa lý trong hệ tọa độ Cartesian ECEF.
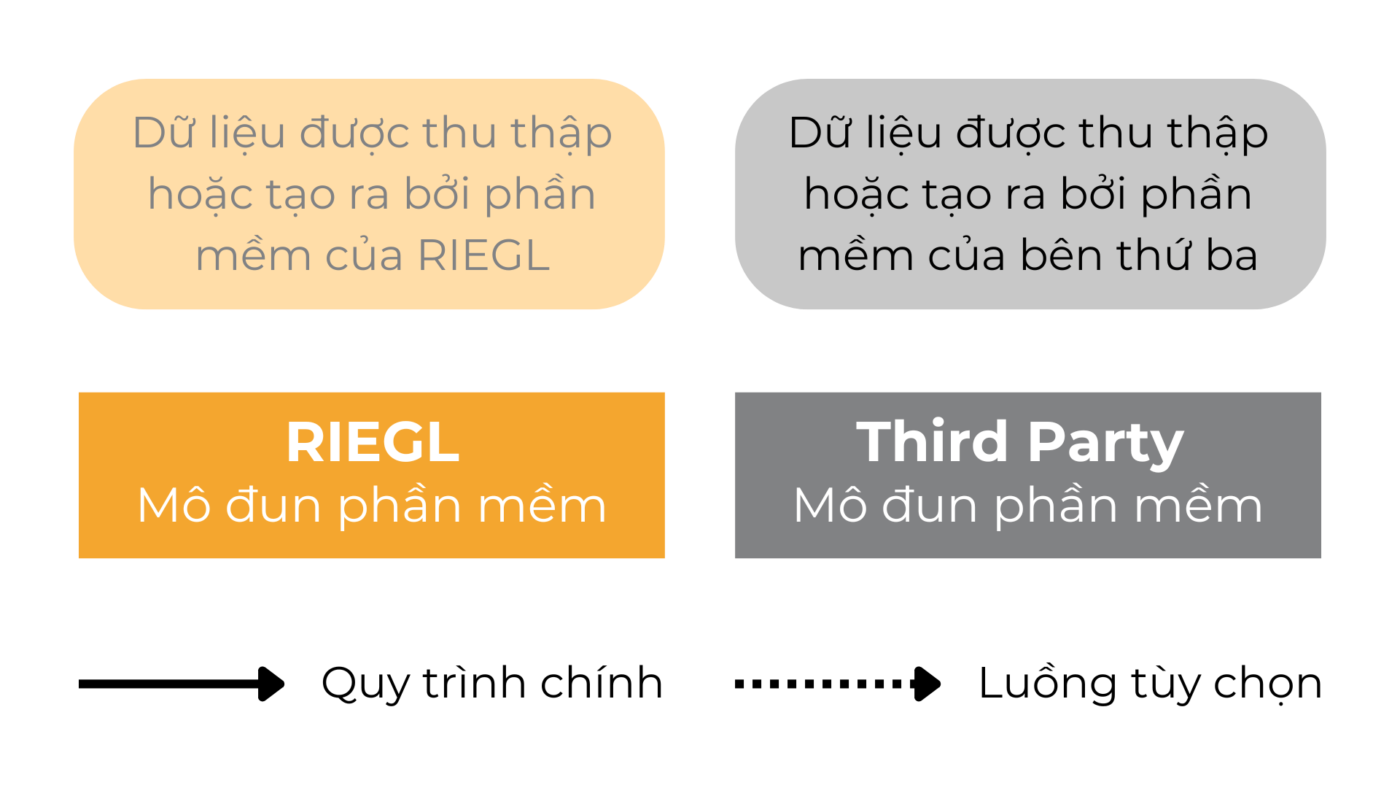
Luồng Công Việc Trong RiPROCESS
Các Tính Năng Chính Của RiPROCESS
- Phần mềm quản lý theo hướng dự án để xử lý dữ liệu của máy quét LiDAR trên không và di động của RIEGL từ dữ liệu thô đến đám mây điểm trong hệ tọa độ Cartesian ECEF hoặc bản đồ chiếu (ví dụ: UTM) bằng cách sử dụng RiUNITE và GeoSysManager ở chế độ điều khiển từ xa
- Truy cập nhanh vào dữ liệu để kiểm tra trực quan trong nhiều định dạng trực quan hóa, từ dữ liệu raster mã hóa màu đến dữ liệu phản hồi kỹ thuật số cho mỗi phép đo của máy quét LiDAR (tùy thuộc vào loại máy quét LiDAR được sử dụng)
- Hiệu chỉnh hệ thống và điều chỉnh dữ liệu quét dựa trên việc khớp nối dữ liệu thu thập trên các đối tượng phẳng
- Phân tích thống kê về chất lượng khớp nối dữ liệu quét; so sánh dữ liệu LiDAR với các đối tượng tham chiếu được khảo sát
- Giao diện với các công cụ xử lý hậu kỳ bổ sung qua LAS và trao đổi dữ liệu ASCII
- Hoạt động trong môi trường đa trạm làm việc nâng cao năng suất xử lý hậu kỳ dữ liệu bằng cách xử lý song song
- Hoạt động như một nền tảng cho RiPRECISION MLS/UAV để điều chỉnh đám mây điểm của dữ liệu di động và UAV (tùy chọn)
- Vận hành các công cụ xử lý thủy văn khác nhau (tùy chọn) cho các máy quét LiDAR địa hình – độ sâu của RIEGL
Plugin Phân Loại LiDAR ALS
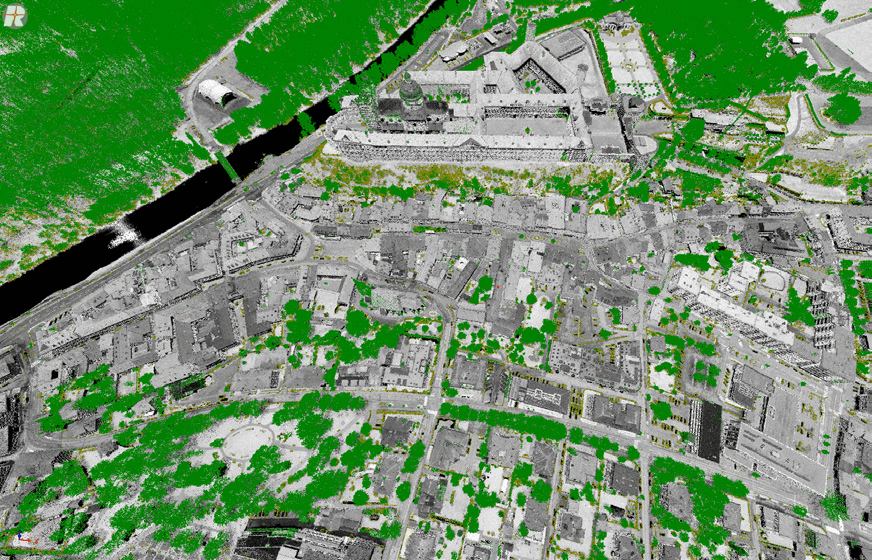
RiPROCESS – Phân Loại Đám Mây Điểm LiDAR trên Không
LIS ALS Classification Plugin này giúp đơn giản hóa việc phân loại dữ liệu đám mây điểm thành mặt đất, tòa nhà và thảm thực vật. Nó được tích hợp hoàn toàn vào phần mềm xử lý dữ liệu RiPROCESS và hoạt động trực tiếp trên dữ liệu đám mây điểm RDB2 của dự án. Việc xuất dữ liệu và chia lưới để phân loại trong phần mềm của bên thứ ba không cần thiết. Phân tích dữ liệu được tối ưu hóa hơn nữa bằng cách xử lý đa luồng.
Dữ Liệu Bề Mặt
Dữ Liệu Thảm Thực Vật

Dữ Liệu Công Trình
Phân loại đám mây điểm ALS
Chuẩn Bị Dữ Liệu
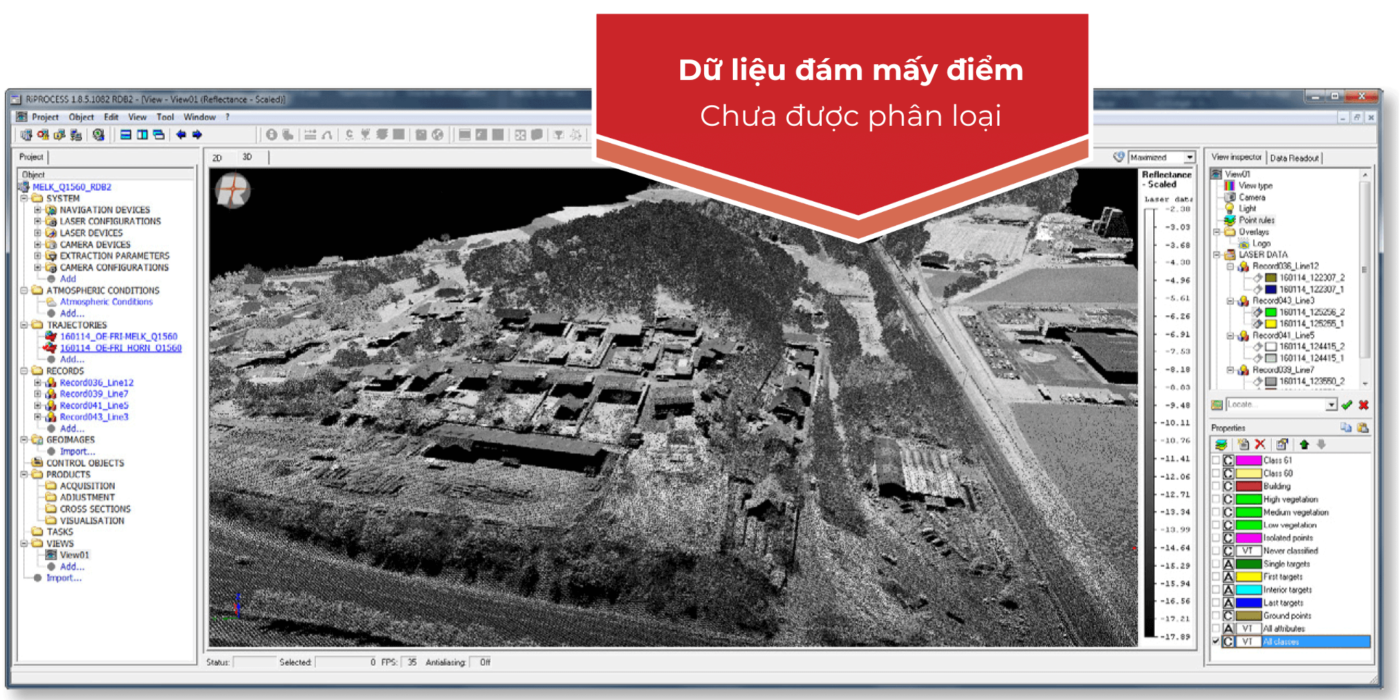
Các bộ phân loại hoạt động trên toàn bộ dữ liệu dự án, các dải bay đã chọn hoặc một vùng quan tâm được người dùng xác định. Việc chia lưới dữ liệu bị chồng chéo được thực hiện trực tiếp trong quá trình phân loại, kết quả phân loại được ghi lại vào từng bản ghi dữ liệu mà không có sự chồng chéo. Các mã phân loại được gán tương ứng với tiêu chuẩn ASPRS LAS.
Phân Loại Bề Mặt

Bộ phân loại mặt đất, dựa trên việc tăng mật độ TIN theo tiến trình, phân tách các điểm mặt đất và các điểm không phải mặt đất. Nó cung cấp ba cài đặt mặc định cho địa hình bằng phẳng, dốc và dốc đứng, có thể được điều chỉnh dễ dàng. Có thể tinh chỉnh thêm các tham số trong cài đặt nâng cao.
Bên cạnh việc phân loại điểm, bộ phân loại cũng tính toán độ cao so với mặt đất của mỗi điểm và lưu trữ nó dưới dạng thuộc tính bổ sung cho các tác vụ phân loại và phân tích tiếp theo.
Phân Loại Thảm Thực Vật & Công Trình
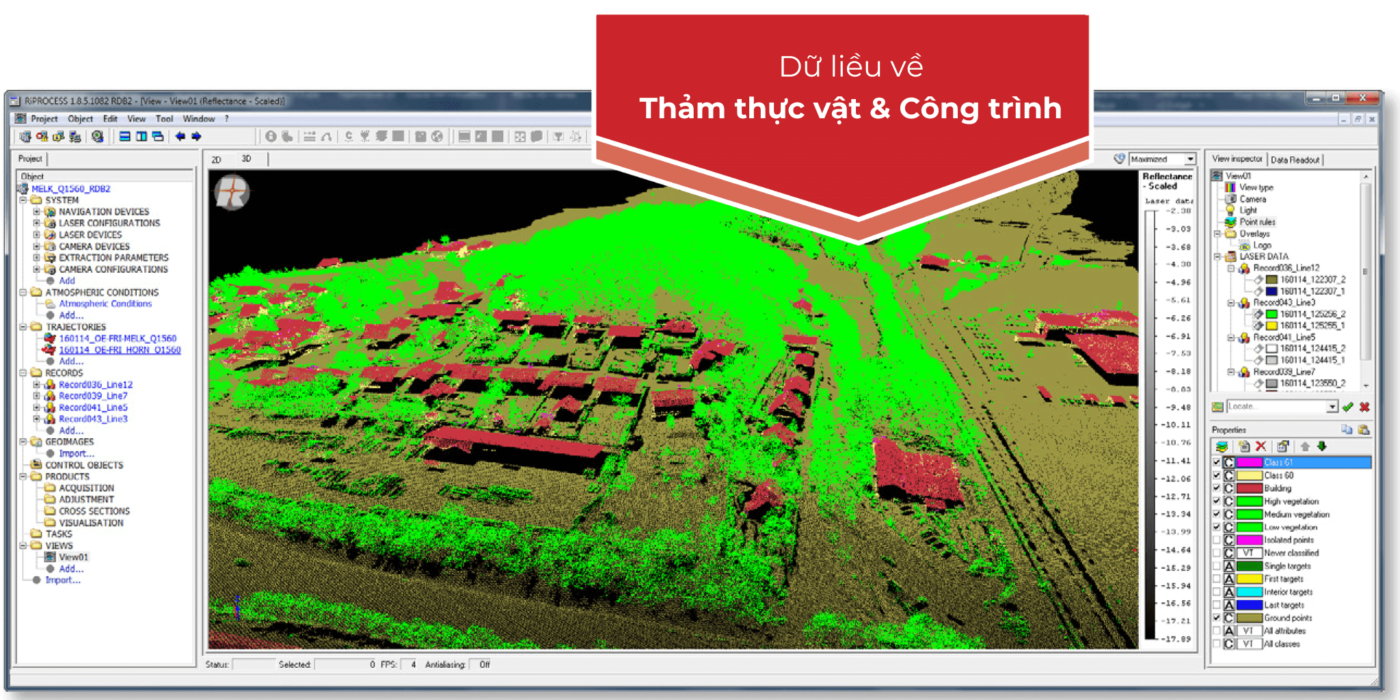
Bộ phân loại thảm thực vật và công trình tiếp tục phân tách tất cả các điểm không phải mặt đất thành các lớp tòa nhà, thảm thực vật và không xác định. Các tòa nhà được phát hiện bằng cách phân đoạn đám mây điểm và phân tích vùng lân cận điểm cục bộ. Các bộ lọc bổ sung có thể được sử dụng để loại bỏ phần còn lại của thảm thực vật khỏi mái nhà và để làm sạch mặt tiền tòa nhà. Các điểm thảm thực vật có thể được lọc bằng mật độ điểm cục bộ và được chia thành thảm thực vật thấp, trung bình và cao.
Lớp Mã ASPRS LAS
1 không xác định | 2 mặt đất | 3 thảm thực vật thấp | 4 thảm thực vật trung bình | 5 thảm thực vật cao | 6 tòa nhà
Yêu Cầu Hệ Thống
| Yêu cầu | Thông số chi tiết |
|---|---|
| Hệ điều hành được thử nghiệm | Windows 10 Pro |
| Yêu cầu về bộ nhớ | 8 GB RAM tối thiểu, 32 GB hoặc nhiều hơn được khuyến nghị |
| Yêu cầu về dung lượng đĩa | Khoảng 1 GB dung lượng đĩa trống cho chương trình và plugin (không bao gồm dữ liệu dự án), ít nhất 8 TB được khuyến nghị cho các dự án của bạn |
| Giao diện | Giao diện mạng (Ethernet, LAN), Tùy chọn: Bộ điều khiển RAID chuyên dụng (ví dụ: RAID 0) và ổ đĩa cứng nhanh hoặc ổ đĩa trạng thái rắn để tăng tốc độ truy cập tệp |
| Yêu cầu về đồ họa | Độ phân giải màn hình tối thiểu 1024 x 768 pixel, Card đồ họa được tăng tốc OpenGL (OpenGL 2.0 hoặc cao hơn được yêu cầu) |
| Thiết bị ngoại vi | Chuột 3 nút, chuột có bánh xe cuộn quang học được khuyến nghị, Bàn phím tiêu chuẩn |
| CPU | Intel Core i7-6xxx hoặc tốt hơn |
